步进电机解析步进电机的类型分类及的制动原理
时间: 2024-07-22 20:59:10 | 作者: 华体会娱乐体育首页
,基于最基本的电磁铁原理,它是一种可以自由回转的电磁铁,其动作原理是依靠气隙磁导的变化来产生电磁转矩。其原始模型是起源于年至年间。年前后开始以控制为目的的尝试,应用于氢弧灯的电极输送机构中。这被认为是最初的步进在缺乏交流电源的船舶和飞机等独立系统中得到了广泛的使用。二十世纪五十年代后期晶体管的发明也逐渐应用在上,对于数字化的控制变得更加容易。到了八十年代后,由于廉价的微型计算机以多功能的姿态出现,步进电机的控制方式灵活性更好多样。
步进电机相对于其它控制用途电机的最大区别是,它接收数字控制信号电脉冲信号并转化成与之相对应的角位移或直线位移,它本身就是一个完成数字模式转化的执行元件。而且它可开环位置控制,输入一个脉冲信号就得到一个规定的位置增量,这样的所谓增量位置控制管理系统与传统的直流控制管理系统相比,其成本明显减低,几乎不必进行系统调整。步进电机的角位移量与输入的脉冲个数严格成正比,而且在时间上与脉冲同步。因而只要控制脉冲的数量、频率和电机绕组的相序,就可以获得所需的转角、速度和方向。
我国的步进电机在二十世纪七十年代初开始起步,七十年代中期至八十年代中期为成品发展阶段,新品种和高性能电机不断开发,目前,随着科学技术的发展,特别是永磁材料、半导体技术、计算机技术的发展,使步进电机在众多领域得到了广泛应用。

作为一种控制用的特种电机,步进电机无法直接接到直流或交流电源上工作,一定要使用专用的驱动电源步进电机驱动器。在微电子技术,特别计算机技术发展以前,控制器脉冲信号发生器完全由硬件实现,控制管理系统采用单独的元件或者集成电路组成控制回路,不仅调试安装复杂,要消耗大量元器件,而且一旦定型之后,要改变控制方案就一定要重新设计电路。这就使得需要针对不一样的电机开发不同的驱动器,开发难度和开发成本都很高,控制难度较大,限制了步进电机的推广。
由于步进电机是一个把电脉冲转换成离散的机械运动的装置,具有非常好的数据控制特性,因此,计算机成为步进电机的理想驱动源,随微电子和计算机技术的发展,软硬件结合的控制方式成为了主流,即通过程序产生控制脉冲,驱动硬件电路。单片机通过软件来控制步进电机,更好地挖掘出了电机的潜力。因此,用单片机控制步进电机慢慢的变成了了一种必然的趋势,也符合数字化的时代趋。
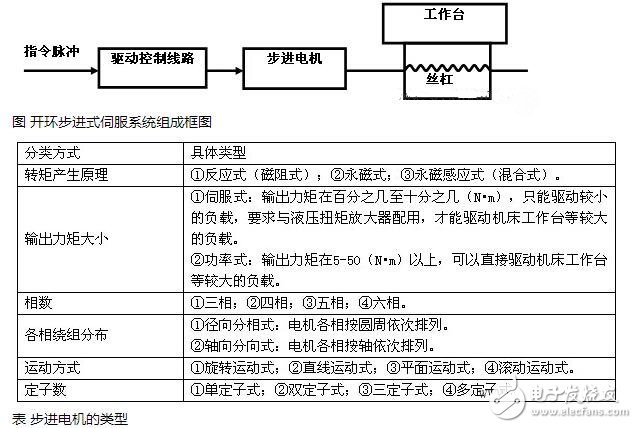
步进电机从其结构形式上可分为反应式步进电机(Variable Reluctance,VR)、永磁式步进电机Permanent Magnet,PM)、混合式步进电机(Hybrid Stepping,HS)、单相步进电机、平面步进电机等多种类型,在我国所采用的步进电机中以反应式步进电机为主。步进电机的运行性能与控制方式有密切的关系,步进电机控制管理系统从其控制方式来看,可大致分为以下三类:开环控制管理系统、闭环控制管理系统、半闭环控制管理系统。半闭环控制管理系统在实际应用中一般归类于开环或闭环系统中。[1]
反应式:定子上有绕组、转子由软磁材料组成。结构相对比较简单、成本低、步距角小,可达1.2、但动态性能差、效率低、发热大,可靠性难保证。
永磁式:永磁式步进电机的转子用永磁材料制造成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5或15)。
混合式:混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构较为复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场占有率,其原因是性能好价格低,配上细分驱动器后效果良好。该种电机的基本步距角为1.8/步,配上半步驱动器后,步距角减少为0.9,配上细分驱动器后其步距角可细分达256倍(0.007/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。
数控装置输出的进给脉冲数量、频率和方向经过驱动控制电路达到步进电机后,能转换为工作台的位移量、进给速度和进给方向。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
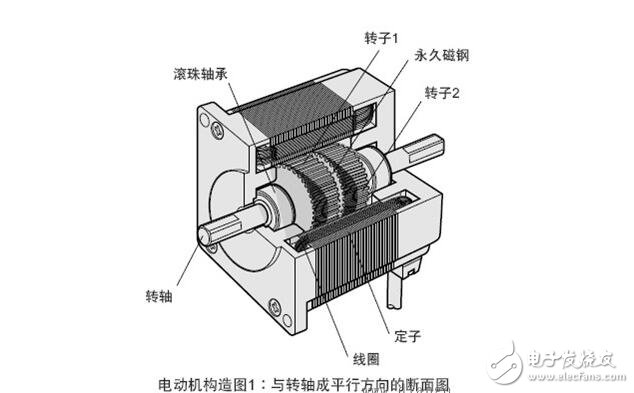
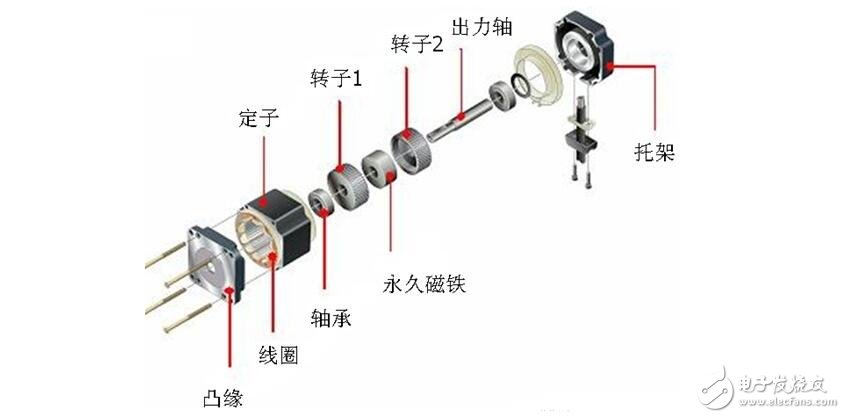
步进电动机构造上大致分为定子与转子两部分。 转子由转子 1、转子 2、永久磁钢等 3 部分构成。而且转子朝轴方向已经磁化,转子 1 为 N 极时,转子 2 则为 S 极。
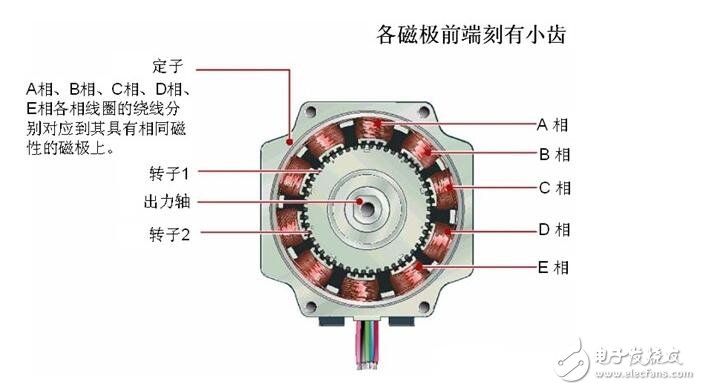
定子拥有小齿状的磁极,共有 10个,皆绕有线圈。 其线圈的对角位置的磁极相互连接着,电流流通后,线圈即会被磁 化成同一极性。(例如某一线圈经由电流的流通后,对角线的磁极将 同化成 S 极或 N 极。) 对角线个相,而由于有 A相至 E相等 5个相位,因此称为 5 相步进电动机。
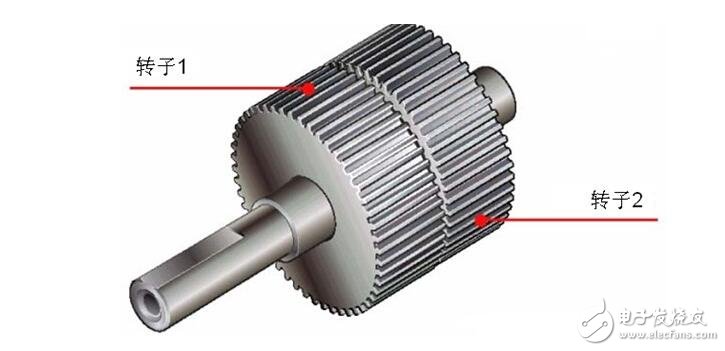
转子的外圈由 50个小齿构成,转子 1 和转子 2 的小齿于构造上互 相错开 1/2 螺距。由此转子形成了100个小齿。目前已经有转子单个加工至100齿的高分辨率型,那么高分辨率型的转子就有200个小齿。因此其机械上就能轻松实现普通步进电机半步(普通步进电机半步需要电气细分达到)的分辨率。
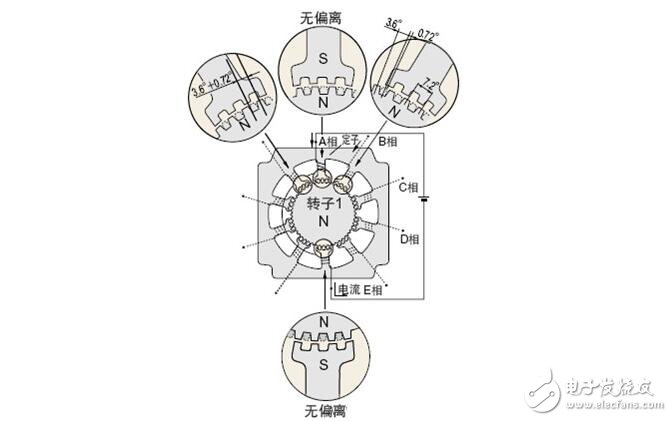
实际上经过磁化后的转子及定子的小齿的位置关系,在此说明如下。 首先解释励磁,励磁就是指电动机线圈通电时的状态。
将 A 相励磁,会使得磁极磁化成 S 极,而其将与带有 N极磁性的 转子 1 的小齿互相吸引,并与带有S极磁性的转子 2 的小齿相斥, 于平衡后停止。此时,没有励磁的 B相磁极的小齿和带有 S极磁性 的转子 2 的小齿互相偏离 0.72。以上是 A 相励磁时的定子和转子小齿的位置关系。
其次由 A 相励磁转为 B 相励磁时,B 相磁极磁化成 N 极,与拥有 S极磁性的转子 2 互相吸引,而与拥有 N极磁性的转子 1 相斥。
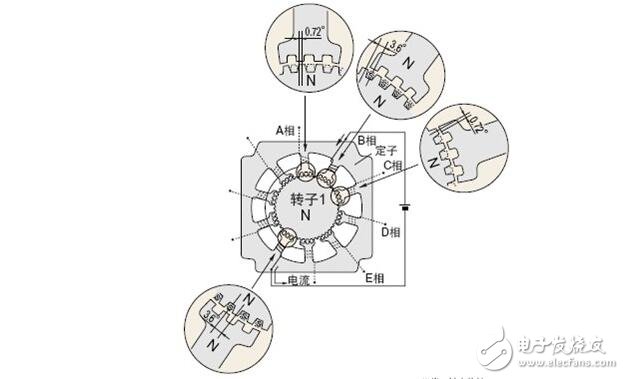
0.72的高分辨率,是取决于定子和转子构造上的机械偏移量,所以不需要编码器等传感器即可正确的定位。下图就5相步进每次的位移量是0.72进行更详细的说明:
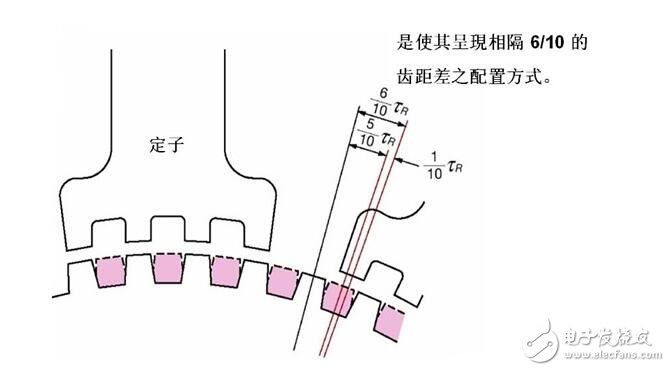
由于第一组定子正好与转子相对应吸引。就势必会导致第二组定子与对应的转子相偏离(定子与转子齿距一样,但是各自所在的2个圆不一样大)。而这个偏离值正好是齿距的十分之一。因此普通5相步进的步距角为:360/50齿/10=0.72
另外,就停止精度而言, 会影响的只有定子与转子的加工精度、组装精度、及线圈的直流电阻的不同等而已,因此可获得 3 分(无负载时)的高停止精度。 实际上步进电动机是由驱动器来进行励磁相的转换,而励磁相的转换时机则是由输入驱动器的脉冲信号所进行。以上举的是 1相位励磁的例子,实际运转时,为有效利用线、步进电动机的特征
以上三部分是步进电机运转必不可少的三部分。控制器又叫脉冲产生器,目前主要有plc、单片机、运动板卡等等。
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下就能使用。它必须由脉冲信号、功率驱动电路等组成控制管理系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业相关知识。但是万丈高楼平地起,从步进电机的基础开始有效学习,无疑为将来的应用打好扎实的基础。